

Lateral-Directional Modal Control Effectiveness for Symmetrical Aircraft with Strong-Coupling Dynamics
-
摘要: 面对称飞行器具有强耦合、弱阻尼的特点,为实现其横航向模态的高效控制,对控制策略效能及高效控制策略选择判据进行了研究.通过建立稳定轴系下横航向耦合动力学模型,得到了模态特征简化表达式;分析了有效的模态控制策略,并推导了各控制策略的效能公式;通过对各控制策略效能的对比分析得到了耦合特征下的高效模态控制策略选择判据;最后通过根轨迹分析、模态特性评估与6自由度仿真进行验证,结果表明理论公式与分析仿真结果一致.高效模态控制策略选择判据能够准确表征不同控制策略的效能关系,可用于指导强耦合面对称飞行器横航向模态控制方案设计.Abstract: In view of the characteristics of strong coupling and week damping, this paper studied the high efficiency lateral-directional modal control strategy of symmetrical aircrafts with coupling dynamics. The linear dynamic model in the stable axis system was derived and simplified expressions of the lateral-directional modal characteristics were obtained. The control strategies of improving the effective modal characteristics under the influence of coupling dynamics were proposed, and the control effectiveness expression of each strategy was derived. The criteria of high efficiency strategy selection were obtained through comparative analysis. Finally, the theoretical results were verified by root locus analysis, effectiveness evaluation of modal improvement strategy and 6-DOF simulation. The results show that the criteria proposed can accurately represent the efficiency relationship of different control strategies and can be used to guide the lateral-directional modal control scheme design of symmetrical aircrafts.
-

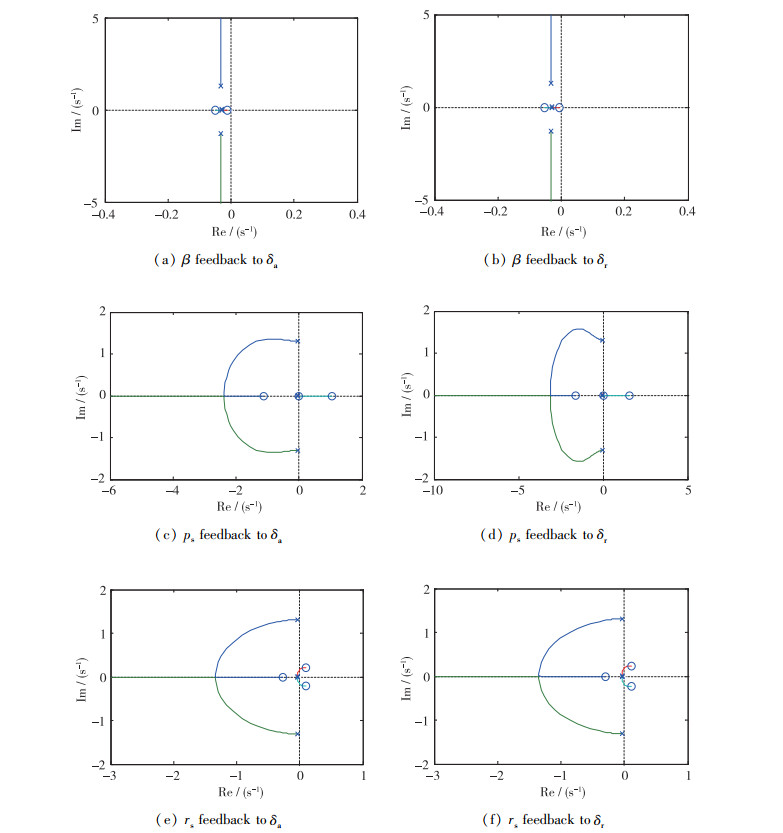
图 1 各反馈控制策略下横航向根轨迹结果
Figure 1. Lateral-directional root locus of each feedback control strategy

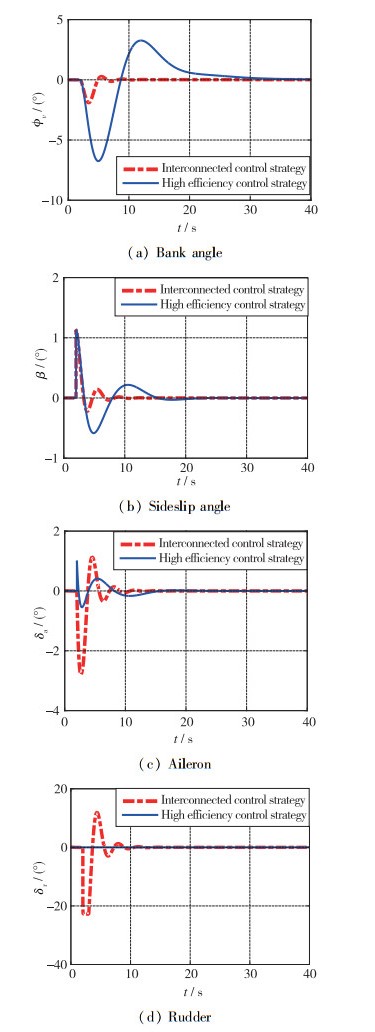
图 2 状态1两种模态控制策略仿真结果对比
Figure 2. Comparison of the simulation results from two modal control strategies at state 1

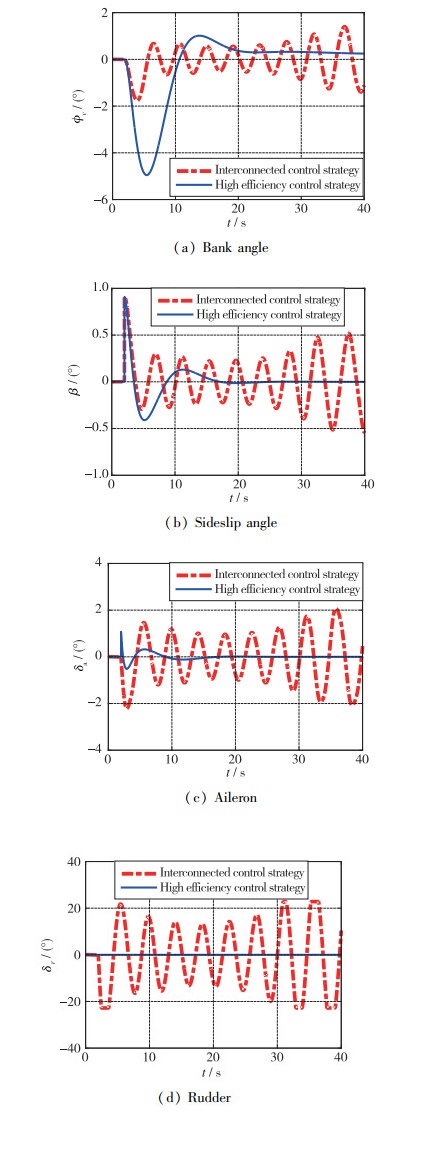
图 3 状态2两种模态控制策略仿真结果对比
Figure 3. Comparison of the simulation results from two modal control strategies at state 2
表 1 荷兰滚模态频率控制策略效能公式
Table 1. Expressions of control effectiveness of Dutch roll mode frequency
control strategy expression of control effectiveness β feedback to δa $ \Delta \omega _{\rm{d}}^2 = k_{\beta^{{\rm{a}}}} ^\delta {{\bar N}_{{\rm{s}}, {\delta _{\rm{a}}}}}$ β feedback to δr $ \Delta \omega _{\rm{d}}^2 = k_{\beta^{{\rm{r}}}} ^\delta {{\bar N}_{{\rm{s}}, {\delta _{\rm{r}}}}}$  下载: 导出CSV
下载: 导出CSV
表 2 荷兰滚模态阻尼控制策略效能公式
Table 2. Expressions of control effectiveness of Dutch roll mode damping
control strategy expression of control effectiveness rs feedback to δa $\Delta \left( {2{\xi _{\rm{d}}}{\omega _{\rm{d}}}} \right) = - k_{{r_{\rm{s}}}}^{{\delta _{\rm{a}}}}{{\bar N}_{{\rm{s}}, {\delta _{\rm{a}}}}} $ rs feedback to δr $ \Delta \left( {2{\xi _{\rm{d}}}{\omega _{\rm{d}}}} \right) = - k_{{r_{\rm{s}}}}^{{\delta _{\rm{r}}}}{{\bar N}_{{\rm{s}}, {\delta _{\rm{r}}}}}$ ps feedback to δa $ \Delta \left( {2{\xi _{\rm{d}}}{\omega _{\rm{d}}}} \right) = - k_{{p_{\rm{s}}}}^{{\delta _{\rm{a}}}}\frac{{{{\bar L}_{{\rm{s}}, \beta }}}}{{{{\bar N}_{{\rm{s}}, \beta }}}}{{\bar N}_{{\rm{s}}, {\delta _{\rm{a}}}}}$ ps feedback to δr $\Delta \left( {2{\xi _{\rm{d}}}{\omega _{\rm{d}}}} \right) = - k_{{p_{\rm{s}}}}^{{\delta _{\rm{r}}}}\frac{{{{\bar L}_{{\rm{s}}, \beta }}}}{{{{\bar N}_{{\rm{s}}, \beta }}}}{{\bar N}_{{\rm{s}}, {\delta _{\rm{r}}}}} $
下载: 导出CSV
表 3 滚转-螺旋模态阻尼控制策略效能公式
Table 3. Expressions of control effectiveness of roll-spiral mode damping
control strategy expression of control effectiveness ps feedback to δa $ \Delta \left( {2{\xi _{\rm{r}}}{\omega _{\rm{r}}}} \right) = - k_{{p_{\rm{s}}}}^{{\delta _{\rm{a}}}}\frac{{{{\bar L}_{{\rm{s}}, {\delta _{\rm{a}}}}}}}{{{{\bar N}_{{\rm{s}}, \beta }}}}{\overline {{\mathop{\rm LCDP}\nolimits} } _{{\rm{s}}, {\delta _{\rm{a}}}}}$ ps feedback to δr $ \Delta \left( {2{\xi _{\rm{r}}}{\omega _{\rm{r}}}} \right) = - k_{{p_{\rm{s}}}}^{{\delta _{\rm{r}}}}\frac{{{{\bar L}_{{\rm{s}}, {\delta _{\rm{r}}}}}}}{{{N_{{\rm{s}}, \beta }}}}{{\mathop{\rm LCDP}\nolimits} _{{\rm{s}}, {\delta _{\rm{r}}}}}$
下载: 导出CSV
表 4 侧滑角反馈对荷兰滚模态的影响
Table 4. Effect of sideslip angle feedback on Dutch roll mode
feedback control law dutch roll mode pole frequency ωd/(rad/s) damping ratio ξd 0 -0.02±0.51i 0.51 4.72×10-2 δa=3β -0.02±0.78i 0.78 3.04×10-2 δr=-3β -0.02±0.81i 0.81 2.57×10-2
下载: 导出CSV
表 5 ps反馈对横航向模态的影响
Table 5. Effect of ps feedback on lateral-directional mode
feedback control law dutch roll mode pole roll-spiral mode pole damping ωrξr 0 -0.02±0.51i -0.03±0.01i 0.03 δa=-ps 0.56±0.26i -0.13-5.53×10-3 0.06 δr=ps 0.38±0.67i -0.45-9.94×10-4 0.23
下载: 导出CSV
-
[1] Day R E. Coupling dynamics in aircraft: a historical perspective[R]. NASA-SP-532, 1997. [2] Zacharias G L. A digital autopilot for the space shuttle vehicle[D]. Massachusetts: Massachusetts Institute of Technology, 1974. [3] Kafer G C. Space shuttle entry/landing flight control design description[R]. Paper No. 82-1601, 1982. [4] Bennett D E. Space shuttle entry flight control overview[J]. Journal of the Astronautics Science, 1983, 31(4): 569-578. [5] 苏二龙, 罗建军, 闫颖鑫, 等. 面向控制的高超声速飞行器总体优化设计方法[J]. 飞行力学, 2012, 30(3): 267-271.Su E L, Luo J J, Yan Y X, et al. Analysis of the control-oriented conceptual design optimization methods for highspeed aerospace vehicles[J]. Flight Dynamics, 2012, 30(3): 267-271(in Chinese). [6] 甄华萍, 蒋崇文. 高超声速技术验证飞行器HTV-2综述[J]. 飞航导弹, 2013(6): 7-13.Zhen H P, Jiang C W. An overview of the technology verifying aircraft[J]. Winged Missiles Journal, 2013(6): 7-13(in Chinese). [7] Moul M T, Paulson J W. Dynamic lateral behavior of high-performance aircraft[R]. 1958: 147-156. [8] Calico Jr R A. A new look at[J]. Journal of Aircraft, 1971, 16(12): 895-896. [9] Szalai K J. The influence of response feedback loops on the lateral-directional dynamics of a variable-stability transport aircraft[R]. NASA-TN-D-3966, 1967. [10] Yin L L, Huang Y M, Sun C Z, et al. Application of sideslip angle change rate feedback in high-speed vehicle[J]. International Journal of Control and Automation, 2016, 9(11): 37-48. doi: 10.14257/ijca.2016.9.11.04 [11] 史丽楠, 李惠峰, 张冉. 滑翔再入飞行器横侧向耦合姿态控制策略[J]. 北京航空航天大学学报, 2016, 42(1): 120-129.Shi L N, Li H F, Zhang R. Gliding vehicle lateral/directional coupling attitude control strategy[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(1): 120-129(in Chinese). [12] Hall C E, Gallaher M W, Hendrix N D. X-33 attitude control system design for ascent, transition, and entry flight regimes[R]. AIAA 98-4411, 1998. [13] 刘军, 黄一敏, 孙春贞, 等. 高超声速飞行器再入段滚转控制及鲁棒性分析[J]. 电光与控制, 2014, 21(7): 81-85.Liu J, Huang Y M, Sun C Z, et al. Roll control and robustness analysis for highspeed vehile[J]. Electronics Optics & Control, 2014, 21(7): 81-85(in Chinese). [14] Huang X, Yang Y, Wang Y J. Cooperative control for the hypersonic vehicle lateral attitude tracking[C]. The 30th Chinese Control and Decision Conference(2018 CCDC), Shenyang: Editorial Department of Control and Decision Making, 2018. [15] 李天任, 张旋, 黄佩, 等. 面对称飞行器横侧向稳定控制设计研究[J]. 导弹与航天运载技术, 2019(3): 68-71, 82.Li T R, Zhang X, Huang P, et al. Study on lateral-directional stable control design of plane-symmetry vehicle[J]. Missiles and Space Vehicles, 2019(3): 68-71, 82(in Chinese). [16] 方振平, 陈万春, 张曙光. 航空飞行器飞行动力学[M]. 北京: 北京航空航天大学出版社, 2005: 341-342.Fang Z P, Chen W C, Zhang S G. Flight dynamics of areocrafts[M]. Beijing: Beihang University Publisher, 2005: 341-342(in Chinese). -

 点击查看大图
点击查看大图
计量
- 文章访问数: 284
- HTML全文浏览量: 172
- PDF下载量: 38
- 被引次数: 0


 邮件订阅
邮件订阅 RSS
RSS